Den menneskelige hånd er med sin unikke kombination af styrke, behændighed og fine motoriske færdigheder et sandt mirakelværktøj fra naturens hånd. Den tager fat, holder eller drejer, rører, skriver eller trykker.
Nu er hånden genskabt ved at udstyre robotter med en griber, der er modelleret efter denne naturlige model, der løser forskellige opgaver ved at lære gennem kunstig intelligens. Festo viser den pneumatiske robothånd BionicSoftHand på Hannover Messen 2019. Kombineret med BionicSoftArm, en pneumatisk letvægtsrobot, er fremtidens koncepter velegnede til menneske-robotsamarbejde.

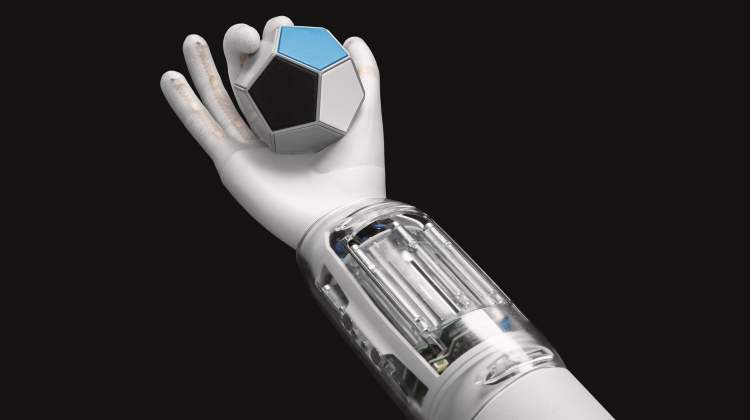
BionicSoftHand drives pneumatisk, således at den kan samarbejde sikkert og direkte med mennesker. I modsætning til den menneskelige hånd har BionicSoftHand ingen knogler. Dens fingre består af fleksible bælgstrukturer med luftkamre. Bælgene er indesluttet i fingrene med et særligt 3D-tekstilstof, der er vævet med både elastiske tråde og højstyrketråde. Med tekstilens hjælp er det muligt at bestemme præcis, hvor strukturen udvider og genererer strøm, og hvor det forhindres i at ekspandere. Dette gør det let, fleksibelt, justerbart og følsomt, men alligevel i stand til at udøve stærke kræfter.
BionicSoftHand bruger metoden reinforcement learning. I stedet for at efterligne en bestemt handling får hånden kun givet et mål. Den bruger forsøg- og fejlmetoden for at nå sit mål. Baseret på modtaget feedback optimerer den gradvist sine handlinger, indtil opgaven er endelig løst med succes.
Specifikt skal BionicSoftHand rotere en 12-sidet terning, så en tidligere defineret side til slut peger opad. Den nødvendige bevægelsesstrategi udføres i et virtuelt miljø ved hjælp af en digital tvilling, der er skabt ved hjælp af data fra et dybdefølsomt kamera og algoritmerne til kunstig intelligens.
For at minimere arbejdet med slangeføring af BionicSoftHand har udviklerne specialdesignet en lille, digitalt styret ventilterminal, som er monteret direkte på hånden. Det betyder, at slangerne til styring af gribefingrene ikke behøver trækkes gennem hele robotarmen. Således kan BionicSoftHand hurtigt og nemt tilsluttes og betjenes med kun én slange for henholdsvis luftforsyning og afblæsningsluft. Ved anvendelse af proportionelle piezoventiler, kan fingrenes bevægelser styres nøjagtigt.
BionicSoftArm: en robotarm, mange variationsmuligheder
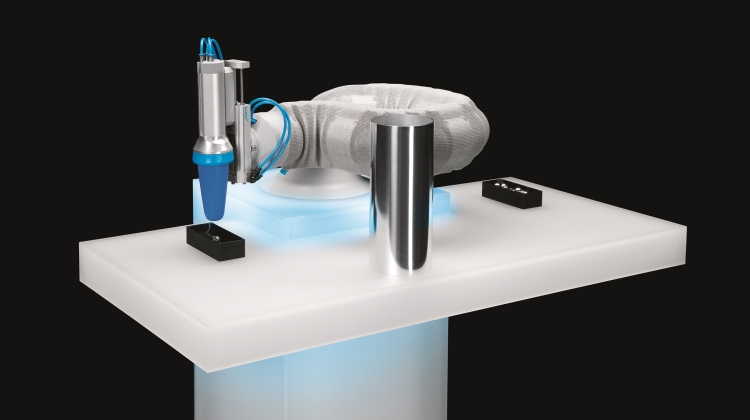
BionicSoftArm er en kompakt videreudvikling af Festos BionicMotionRobot, hvis anvendelsesområde er blevet betragteligt udvidet. Det muliggøres ved hjælp af det modulære design: Den kan kombineres med op til syv pneumatiske bælgesegmenter og roterende drev. Dette sikrer maksimal fleksibilitet med hensyn til rækkevidde og mobilitet, således at den kan forbigå forhindringer selv i de mindste rum, hvis det er nødvendigt.
Samtidig er den fleksibel og kan arbejde sikkert med mennesker. Direkte menneske-robotsamarbejde er muligt med BionicSoftArm, såvel som dets anvendelse i klassiske SCARA-applikationer, såsom pick-and-place-opgaver.

Den modulære robotarm kan anvendes til en bred vifte af applikationer afhængig af design og den monterede griber. Takket være dens fleksible kinematik kan BionicSoftArm direkte og sikkert samarbejde med mennesker. Samtidig gør kinematikken det lettere for den at tilpasse sig forskellige opgaver på forskellige steder i produktionsmiljøer. Det eliminerer dermed dyre sikkerhedsanordninger såsom bure og lysbarrierer, forkorter omstillingstiden og muliggør således fleksibel brug – helt i overensstemmelse med adaptiv og økonomisk produktion.